 da
da de
de en
en fr
fr it
it nb
nb nl
nl pt
pt sv
sv fi
fiCómo contribuye Ethernet de Automoción al desarrollo de los controladores de dominio
Hubo un tiempo en el que cada unidad de control del automóvil funcionaba de forma completamente autónoma y, por tanto, disponía de sus propios sensores y actuadores. Por lo tanto, estos sensores y actuadores se conectaban directamente a la unidad de control. Simple y eficaz. Sin embargo, a medida que aumentaba el número de sensores, actuadores y unidades de control, también crecían los mazos de cables. Pronto se necesitaron literalmente kilómetros de cable y la visión de conjunto era difícil de encontrar. Había que buscar una mejora.
Por eso se introdujo la red CAN a principios de los 90. Las unidades de control podían intercambiar información entre sí, incluidas las señales de los sensores. Una auténtica revolución en el mundo del automóvil. Desde entonces, la arquitectura de red dentro de un vehículo ha seguido desarrollándose. Con la llegada de las cadenas cinemáticas eléctricas y la tecnología autónoma, está garantizado que se darán pasos aún mayores en un futuro próximo.

Pero esto también significa que cambiará mucho la forma en que se implementa la electrónica en un vehículo. Resumiendo: dentro de 10 años, un controlador de dominio o un superordenador se encargará de todas las funciones de la cadena cinemática. La ECU, tal y como la conocemos ahora, tendrá entonces un papel más subordinado. A medida que estos controladores de dominio y las redes asociadas sigan desarrollándose, las unidades de control individuales irán desapareciendo poco a poco (sí, la ECU también), hasta que finalmente sólo un puñado de controladores de dominio o superordenadores manden en el gallinero.
Pero antes de eso, queremos explicar un poco más sobre la red que desempeñará un papel importante en todo esto. A pesar de que Ethernet de Automoción está disponible desde hace bastante tiempo, su ingenio va en aumento.
El comienzo: Una pasarela central
La industria del automóvil busca constantemente una mayor velocidad de transmisión de datos y más posibilidades de comunicación mutua. Ya en 2004, durante el desarrollo de la red FlexRay, los fabricantes de automóviles se dieron cuenta de que tenían que tomar un nuevo camino en cuanto a la comunicación entre las distintas unidades de control. El tamaño de las actualizaciones de software se les estaba yendo de las manos y, con la velocidad del CAN HS que se utilizaba entonces, una actualización tardaría literalmente decenas de horas. Una situación inviable, desde luego.
La solución llegó en 2008 en forma de una pasarela central, que no sólo tenía la tarea de intercambiar datos entre las distintas redes CAN, FlexRay y MOST (Media Oriented Systems Transport / Sistemas Orientados a los Medios de Transporte) existentes, sino que también servía de interfaz con el mundo exterior para el diagnóstico y la programación (actualizaciones de software, etc.). BMW fue la primera en contar con una pasarela central de este tipo.
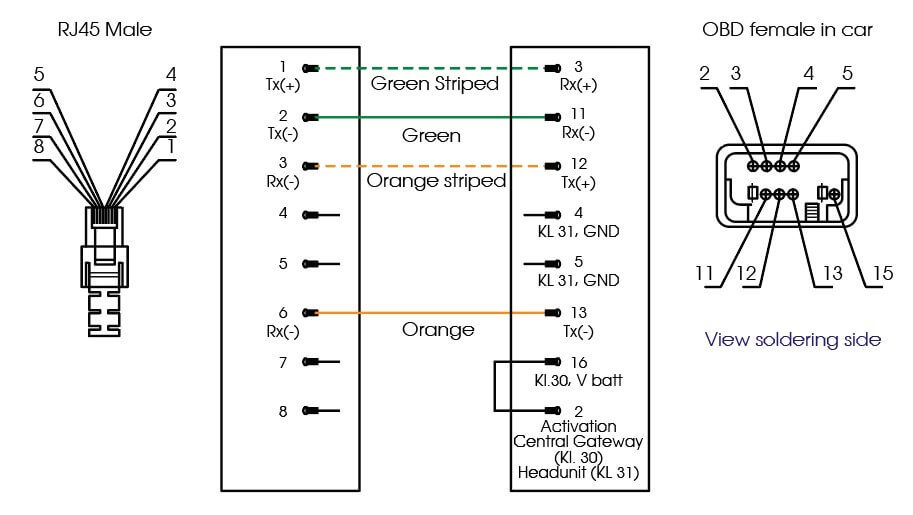
Imagen: Las clavijas 3, 11, 12 y 13 del puerto OBDII se utilizan para comunicarse con el exterior a través de una conexión Ethernet
Así que el puerto OBDII ya no tenía dos líneas CAN para que el equipo del concesionario se comunicara con el coche, sino cuatro líneas Ethernet, que corresponden exactamente al conector RJ-45 que tan bien conocemos del Ethernet en las redes de ordenadores. Los pines 3, 11, 12 y 13 del puerto OBDII se utilizan así para comunicarse con el exterior a través de una conexión Ethernet.
Norma Ethernet para Automoción: 100BASE-T1
La tecnología Ethernet existe, por supuesto, desde hace tiempo. Pero no existía ninguna aplicación para la industria del automóvil debido a los requisitos tan estrictos que deben cumplir los chips y otros componentes electrónicos. Hasta 2004, Ethernet nunca se había utilizado en vehículos, por lo que hubo que desarrollar toda una nueva gama de chips, semiconductores e interruptores, expresamente para estos fines. El cableado también supuso un reto, ya que por diversas razones se deseaba alcanzar los 100 Mbps en un cable de un solo par trenzado no apantallado (un cable igual que el CAN y el FlexRay). Al final, esto dio lugar a un nuevo estándar Ethernet especialmente para la industria del automóvil: 100BASE-T1. Se introdujo en 2013 y tenía una velocidad de transmisión de datos de 50 Mbps. En 2020 se introdujo la 1000BASE-T1, que puede ofrecer una velocidad de datos de 1000 Mbps (1 Gbps). La industria ya está trabajando duro para alcanzar velocidades de 50 Gbps.
Posibilidades para el futuro
Dado que Ethernet se ha convertido en parte integrante de la vida cotidiana, las posibilidades son ahora infinitas. La tecnología informática de los actuales ordenadores personales, portátiles y tabletas también podrá implantarse en los vehículos con la llegada de Ethernet para Automoción. Esto también significa que la potencia de cálculo gráfico para la conducción autónoma ya no es un problema.
Para hacerse una idea precisa de la transformación en la arquitectura de la red, es necesario darse cuenta de cómo está dispuesta la comunicación en los vehículos actuales (de 3ª generación). En la imagen inferior, la pasarela central se muestra como el bloque morado más grande. Los bloques verdes más pequeños son unidades de control que disponen cada una de su propia red de comunicación: LIN, CAN o FlexRay.
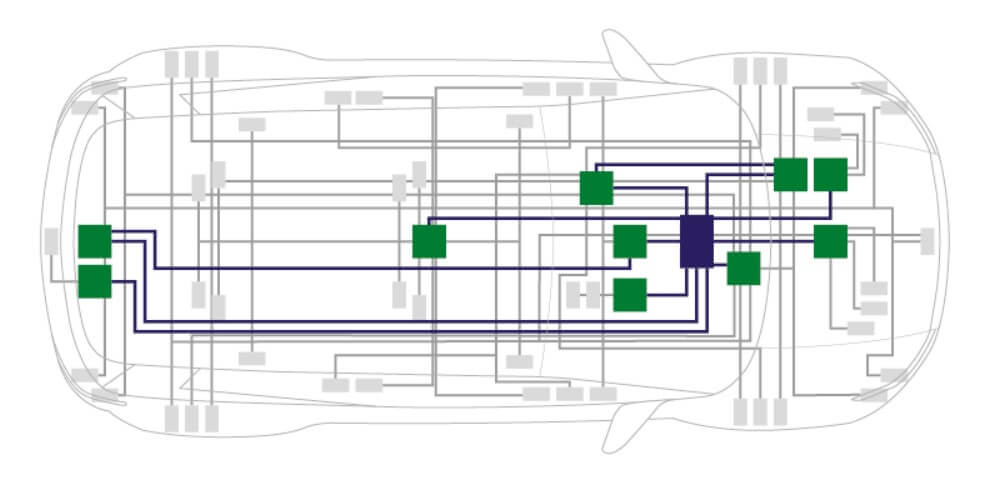
Imagen: Arquitectura de la red de comunicación en los vehículos actuales (3ª generación)
Sin embargo, el número de unidades de control se nos está yendo de las manos y las actuales unidades de control ya no podrán hacer frente a sus tareas en un futuro próximo. Por lo tanto, se situarán controladores de dominio bajo la pasarela central, todos los cuales también se comunicarán a través de Ethernet (también mostrada en morado). Uno de esos controladores de dominio se centrará exclusivamente en todos los datos y funciones relacionados con la conducción autónoma. En esta red de 4ª generación, las unidades de control y las subredes seguirán existiendo, sin duda, pero la red tendrá la velocidad allí donde se necesite.
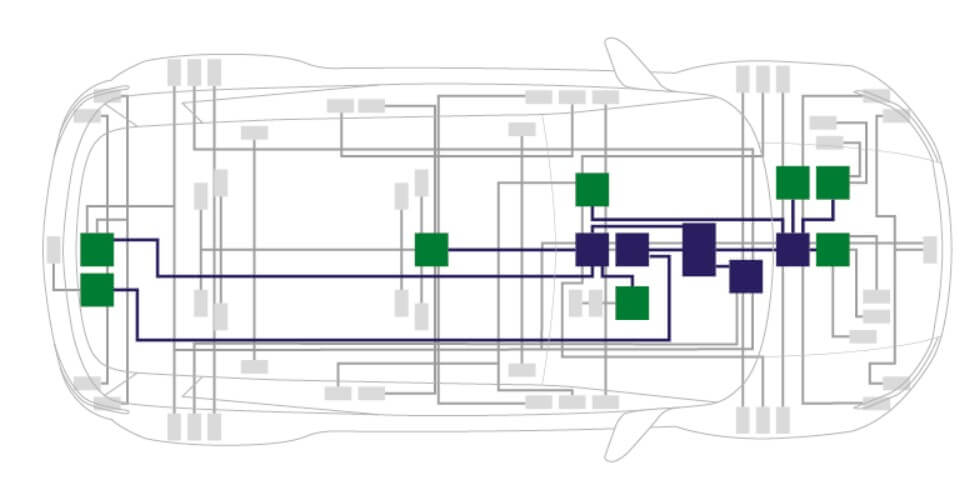
Imagen: Arquitectura de la red de comunicaciones en los vehículos del futuro próximo (4ª generación)
Es difícil predecir con exactitud cómo será en la práctica una red de 5ª generación, pero tras la implantación de los controladores de dominio se espera una tendencia clara: la estructura será considerablemente menos compleja gracias a la reducción masiva de componentes. La llegada de sensores y actuadores inteligentes hará completamente innecesario el uso de unidades de control. Lo que quedará será una red ligera pero potente de unos pocos controladores de dominio o superordenadores que gestionarán todos los sistemas del vehículo trabajando en estrecha colaboración.