 da
da de
de en
en fr
fr it
it nb
nb nl
nl pt
pt sv
sv fi
fiEl sensor de ángulo de dirección y el sensor de aceleración: una guía completa
El sensor de ángulo de dirección generalmente se monta exactamente donde lo esperaría: detrás del volante, alrededor de la columna de dirección. De vez en cuando, un fabricante elige colocar el sensor cerca de la timonera, pero esto es bastante raro. Hay varios tipos en circulación. El tipo de efecto Hall es el más popular, pero todavía existen versiones con contactos deslizantes. Además, también existen sensores ópticos digitales que proporcionan una señal específica para el ángulo de giro medido en ese momento. Mencionaremos brevemente las diferencias entre ellos.
Analógico con contacto deslizante
El sensor de ángulo de dirección analógico se compone de dos potenciómetros, también conocidos como divisores de voltaje. Estos divisores de voltaje utilizan una ruta de resistencia fija, a menudo hecha de carbono, a través de la cual pasa el voltaje. Un contacto deslizante en movimiento se mueve a través de esta ruta de resistencia y la posición en la que se encuentra el contacto en ese momento determina la cantidad de voltaje que pasa. Hay versiones que funcionan con un voltaje de referencia de 5 voltios y versiones que usan 12 voltios. El segundo divisor de tensión no pretende ser un medio de control, sino determinar el sentido de giro del volante: izquierda o derecha. Al colocar los divisores de voltaje en direcciones opuestas, la diferencia de voltaje determina si el volante gira en sentido horario o antihorario. La salida de voltaje en la posición cero (cuando el volante y las ruedas están rectos) puede diferir según el divisor de voltaje. Esto se hace a propósito para que se pueda medir si el sensor del ángulo de dirección funciona correctamente. Ahora hay muchas variantes de este tipo de sensor de ángulo de dirección, por lo que lamentablemente no podemos mencionar valores medidos específicos.
Sucede que los contactos deslizantes se desgastan hasta tal punto que ya no es posible un contacto permanente. Por esa razón, los contactos deslizantes se usan cada vez menos en la industria automotriz. Entonces, si dicho sensor de ángulo de dirección falla o pierde la señal ocasionalmente, primero verifique esos contactos deslizantes.
Efecto-Hall
Los sensores de ángulo de dirección que utilizan el efecto Hall (como los LWS5 y LWS6 de Bosch) funcionan sin contacto y, por lo tanto, no se ven afectados por el desgaste. Al igual que los sensores de rueda activos, este sensor de ángulo de dirección utiliza un anillo multipolar. Los sensores Hall (de hecho, varios) detectan cada movimiento con una precisión de 1,5 grados y generan señales de bloqueo hacia la unidad de control. La fase de la señal de cada sensor Hall es diferente, por lo que la dirección de rotación se puede determinar de inmediato y se puede descartar que el sensor no esté funcionando correctamente. Lo que sigue es un cálculo del ángulo de dirección real, la dirección de rotación y la velocidad de rotación. El resultado se convierte en una señal CAN y se envía inmediatamente a la ESP-ECU.
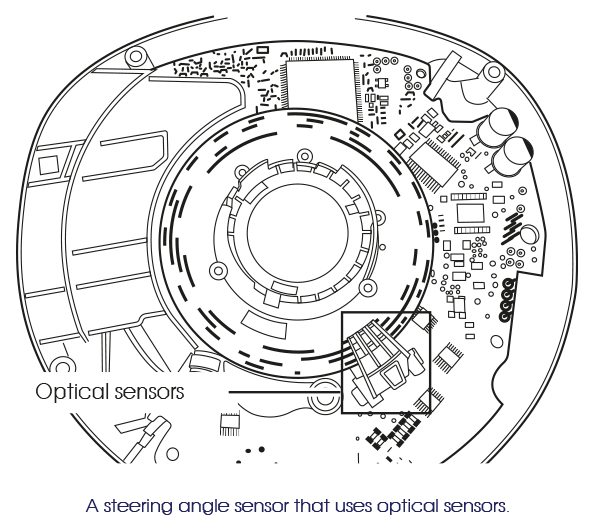
Óptico
Mercedes-Benz en particular fue un gran admirador de los sensores ópticos de ángulo de dirección durante un tiempo. Este tipo de sensor también genera varias señales de bloque, pero en lugar de magnetismo, ahora se usa luz. Mediante el uso de varias pistas, cada una con su propio patrón de orificios, se crean diferentes señales. El controlador compara estas señales y el resultado se convierte en una señal digital utilizable.
Al principio, podría pensar que este tipo de sensor funciona tan bien como un sensor Hall, pero los sensores ópticos tienen un gran enemigo: la contaminación. Un poco de polvo puede ser suficiente para bloquear el haz de luz e interrumpir la señal. Por lo tanto, los sensores ópticos solo son adecuados para un entorno completamente cerrado.
En caso de fallas en los sensores ópticos, siempre verifique primero si hay polvo y otra contaminación. ¡Soplar esta contaminación puede ser suficiente para resolver el problema!
Calibración
Calibrar el sensor del ángulo de dirección es muy fácil con la ayuda de un buen equipo de diagnóstico. A menudo, una dirección completa a la izquierda y a la derecha es suficiente para programar completamente el sensor. También se conocen sensores de autoaprendizaje. Una vuelta completa a la izquierda ya la derecha con el encendido conectado es suficiente. En muchos casos, el propio sistema ESP también puede detectar si es necesaria una calibración comparando los valores del sensor de ángulo de dirección con los de los distintos sensores de aceleración. Si el sistema detecta que el automóvil avanza en línea recta, pero el ángulo de dirección se desvía demasiado, el ESP se apagará y se encenderá la luz de fallo.
Dirección asistida eléctrica
El sensor de ángulo de dirección se usa no solo para controlar el ESP, sino también para controlar la dirección asistida eléctrica. Un motor eléctrico impulsa el movimiento de dirección tan pronto como se detecta un cambio en el ángulo de dirección. Esto hace que la dirección asistida hidráulica sea superflua. La ventaja de este sistema no está solo en el ahorro de espacio y peso, sino también en las opciones de ajuste de la dirección.pescando Esto permite, por ejemplo, crear una sensación cómoda o deportiva. También puede ser muy útil al estacionar, por ejemplo, piense en el botón de "ciudad" de Fiat que hace que la dirección se sienta extremadamente ligera. Una desventaja de la asistencia eléctrica es la falta de sensación: debido a que el motor eléctrico determina el movimiento, las reacciones de las ruedas sobre la superficie de la carretera se transmiten apenas perceptiblemente al volante.
BMW Serie 3 E90: mensajes de error momentáneos DSC
Supongamos: de vez en cuando aparece brevemente un mensaje DSC en el tablero, pero desaparece tan repentinamente como llegó. La lectura no funciona porque el error no se guarda. Aún así, el mensaje vuelve de vez en cuando. ¿Que se hace entonces? La única opción que tiene entonces es verificar todo lo que puede causar averias intermitentes. Un consejo que podemos dar en el caso del BMW Serie 3 E90: revisa el sensor de ángulo de dirección. Hay varios casos conocidos en los que el sensor del ángulo de dirección estaba tan desgastado que provocó averias. No sabemos por qué esto es tan específico rn el E90.
Sensor de aceleración
Además del ángulo de dirección, la 'ESP-ECU' también necesita valores actuales que le indiquen qué movimiento está realizando el vehículo. Los sensores de aceleración están destinados a esto. Estos sensores se pueden dividir en dos variantes: los sensores de aceleración lateral y los sensores de velocidad de guiñada. Sin embargo, casi nunca encontrará estos sensores por separado en la práctica: tanto Continental como Bosch han integrado estos sensores en una carcasa. Tomaremos el sensor del Bosch 5.7 ESP un poco más antiguo como ejemplo para explicar cómo funciona.
Calibración de sensores ESP
Importante para sistemas con ESP: después de la instalación, todos los sensores ESP siempre deben ser recalibrados. El mejor equipo de diagnóstico universal también tiene esta función. Si esto no sucede, el mal funcionamiento está garantizado.
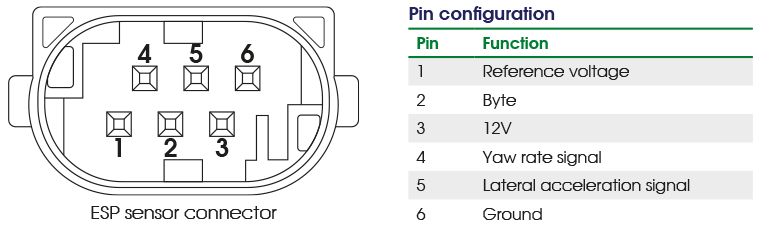
El sensor ESP utiliza una fuente de alimentación (12 V), massa en un bite(señal de bloqueo, 0 – 6,8 V). El bite se utiliza como medio de control y se envía junto con la señal de salida del sensor de velocidad de guiñada. Además, el sensor de ángulo de guiñada también utiliza un voltaje de referencia (2,5 V). El sensor del ángulo de guiñada influirá positiva o negativamente en esta tensión de referencia: positivo con un ángulo de guiñada positivo, negativo con un ángulo de guiñada negativo. Por lo tanto, la salida varía de 0,7 V a 4,3 V. Debido a que el control-bite influye en esta señal, la señal de salida debería verse así:
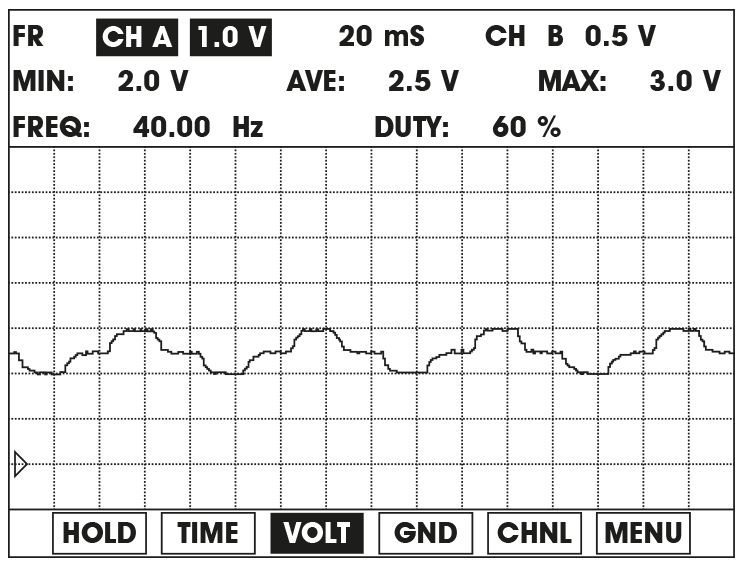
ATENCIÓN: ¡En el caso de una señal rectilínea, el sensor está defectuoso!
El sensor de aceleración lateral no utiliza el voltaje de referencia y control-bite. La señal de salida es lineal y varía de 0,5 V a 4,5 V. Para alcanzar estos valores, se debe lograr una fuerza gravitacional de -1,5 G o +3,5 G.
Evolución
Aunque la historia anterior proporciona mucha información sobre el funcionamiento de los sensores ESP, muchas cosas han cambiado desde entonces. Al igual que el resto de la electrónica de los vehículos, ESP también pasó lentamente de señales analógicas a mensajes CAN. Después de todo, una red central ofrece muchas ventajas. Por poner dos ejemplos: la señal está disponible en todo el vehículo y se ahorra mucho en cableado. Esto ahorra espacio y peso.
La tecnología en los propios sensores también ha mejorado. Si hacemos la comparativa entre Bosch 5.7 ESP y Bosch 8.0 ESP, vemos claras diferencias. Tanto el sensor lateral como el sensor de ángulo de guiñada ahora usan material piezo-eléctrico que genera un voltaje creciente a medida que aumenta la fuerza de aceleración.
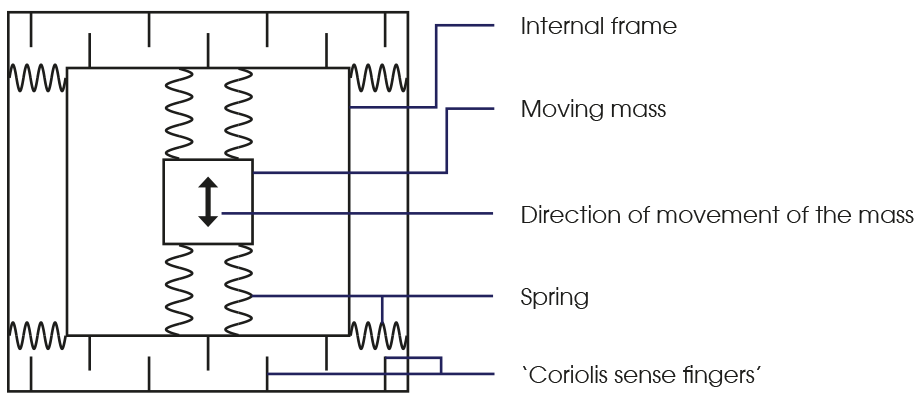
Una masa suspendida se coloca en el centro del material piezo-eléctrico. Tan pronto como el automóvil acelera o gira en cierta dirección, también lo hace la masa. La fuerza requerida para mover esta masa fuera de su posición de reposo genera un cierto voltaje en el material piezo-eléctrico. Probablemente no sea necesario explicar que este voltaje aumenta cuanto más se mueve la masa de su posición de reposo.
Este voltaje se convierte a su vez en una señal eléctrica. Al aplicar un cálculo a los valores de la aceleración lateral y la aceleración de giro, también es posible comparar el movimiento del automóvil con el ángulo de giro.
Un dato curioso:
La nueva generación de sensores de ángulo de guiñada también se denomina iMEMS: sistema microelectromecánico integrado. Gracias a esta técnica, el sensor del ángulo de guiñada se ha vuelto tan pequeño que la integración en la ECU ya no es un problema. Las ECU's ABS modernas, como ciertos tipos de ATE Teves MK60E, ya no necesitan sensores ESP externos.
Por lo tanto, piense detenidamente en esto en caso de mal funcionamiento relacionado con ESP: el mal funcionamiento ahora también puede ubicarse dentro de la ECU.
Código de error 01423 - Sensor de velocidad de guiñada
En caso de ajuste básico/adaptación incorrectos: vuelva a realizar el ajuste básico. En caso de falla del circuito eléctrico: verificar el cableado al sensor de velocidad de derrape (G200) y compruebe la tensión de alimentación del sensor. ¿Todo bien? Luego reemplace el sensor. Si el código de error persiste después de esto, comuníquese con nuestro Servicio al cliente.
Dirección activa
Los automóviles equipados con dirección activa, como BMW y Mercedes-Benz, tienen dos sensores ESP: un sensor principal debajo del asiento del conductor y un sensor secundario debajo del asiento del pasajero. El segundo sensor es prácticamente el mismo que el sensor principal, pero tiene una resistencia de terminación (el sensor principal no) y también usa una ID de CAN diferente. Por lo tanto, no puede intercambiar los sensores entre sí. La forma en que el sistema ESP utiliza ambos sensores es bastante diferente. Los valores del segundo sensor se utilizan únicamente como un medio para verificar los valores del sensor principal. Por lo tanto, el segundo sensor no puede asumir la función del sensor principal. Tan pronto como se mide una diferencia entre los dos sensores, el sistema falla. Por cierto, ambos sensores funcionan de forma pasiva: solo se envía una señal cuando la ECU del sistema ESP lo solicita. Afortunadamente, como se mencionó anteriormente, esto sucede cada 10 milisegundos.